Wenhao Gu
A calibration-free workflow for image-based mixed reality navigation of total shoulder arthroplasty
Wenhao Gu, Kinjal Shah, Jonathan Knopf, Chad Josewski, Mathias Unberath
Dec 2021
Abstract
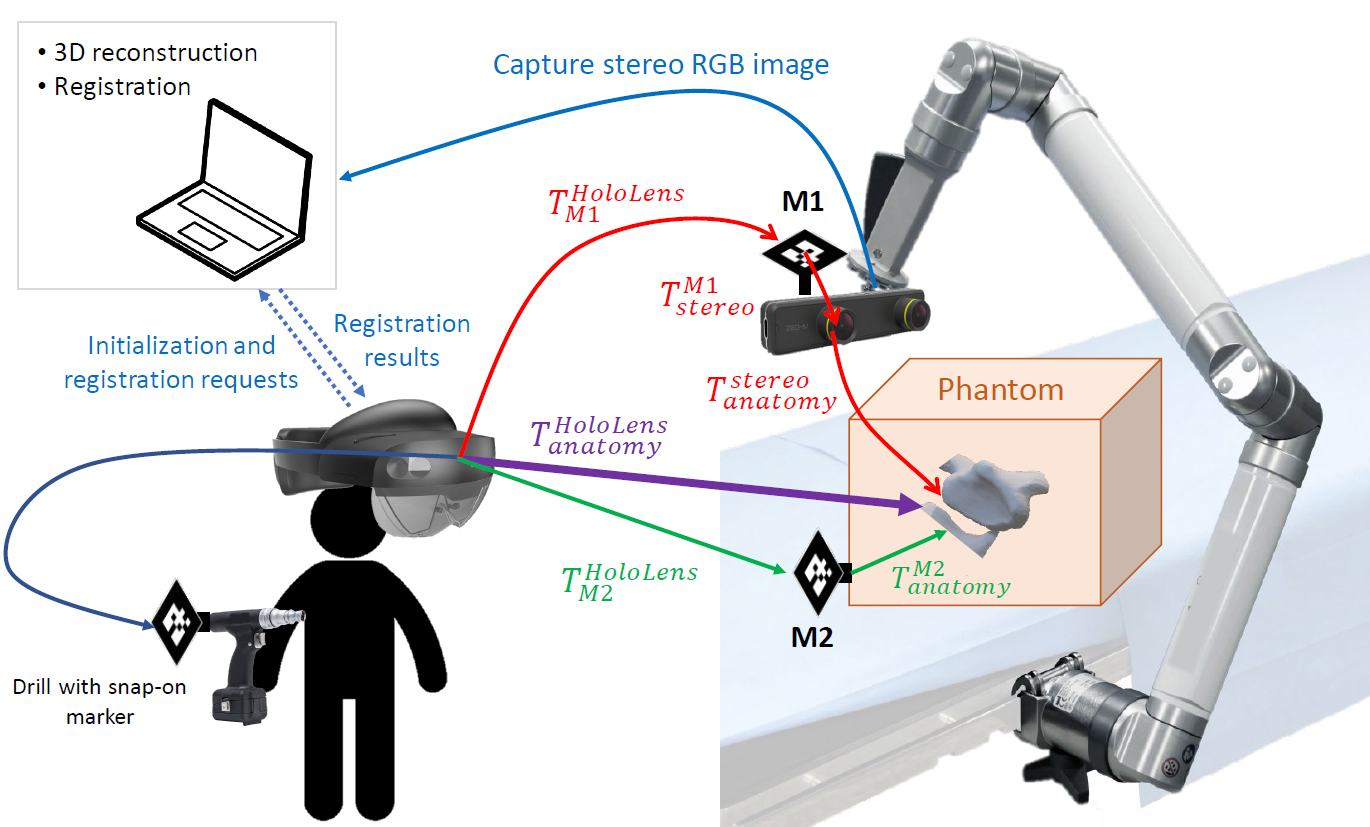
Accurate pin placement to guide renaming of the glenoid surface in total shoulder arthroplasty (TSA) is a critical step to restore range of motion in the glenohumeral joint. Achieving proper pin position with free-hand is complicated due to inadequate intra-operative availability of pre-operative planning data. Mixed reality provides a new modality of surgical navigation for arthroplasty without distracting surgeon from the patient anatomy. However, achieving accurate alignment between the pre-operative plan and the intra-operative anatomy is challenging, especially if workflow-compliant solutions are desired. In this paper, we present a calibration-free mixed reality navigation workflow for glenoid pin placement in TSA that contributes to solving some open challenges. We use a visible light stereo camera on a surgical support arm combined with a transformer-based disparity estimation algorithm to accurately reconstruct the 3D anatomy despite surgical lighting. Besides, we introduce a slide-on marker calibrated by design to overcome perceptual difficulties that arise when trying to align real to virtual objects. In a user study on a semi-anthropomorphic phantom, we assess the end-to-end pin placement accuracy using both our system and a clinical reference standard solution that relies on patient-specific drill guides. Averaging over 15 drilled trajectories, our mixed reality system achieved a pin placement accuracy of (3.80 ± 1.28 mm, 4.66 ± 2.85°).